Группа исследователей из Кембриджского Университета решила позаимствовать из автоматически управляемой робототехники идею навигации даже при отсутствии подключения к GPS и добавить её в мобильные телефоны.
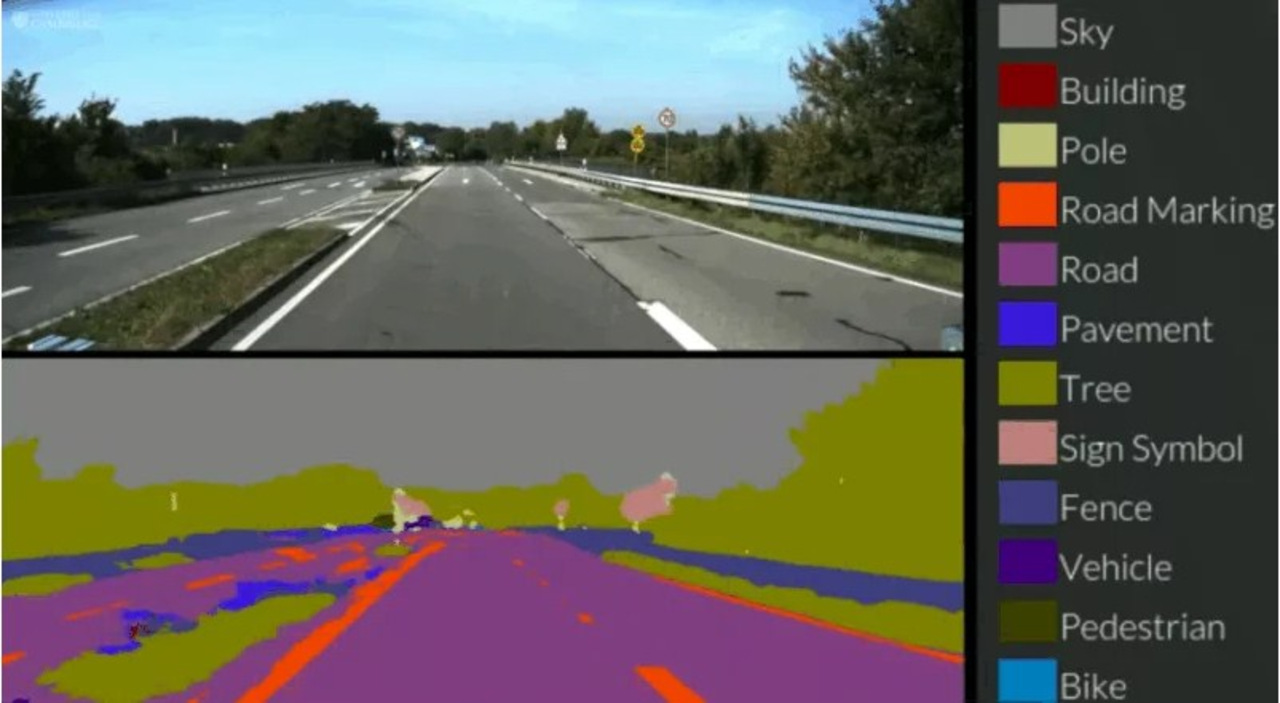
Вообще, команда разработала два новых приложения для мобильных устройств, которые можно сравнить с круиз-контролем в машине. Первое, под названием SegNet, получает картинку с камеры смартфона и может таким образом распознавать объекты, разделяя их на 12 категорий – например, дороги, таблички с названиями улиц, пешеходы, здания и даже велосипедисты. Вот как выглядит это приложение в действии:
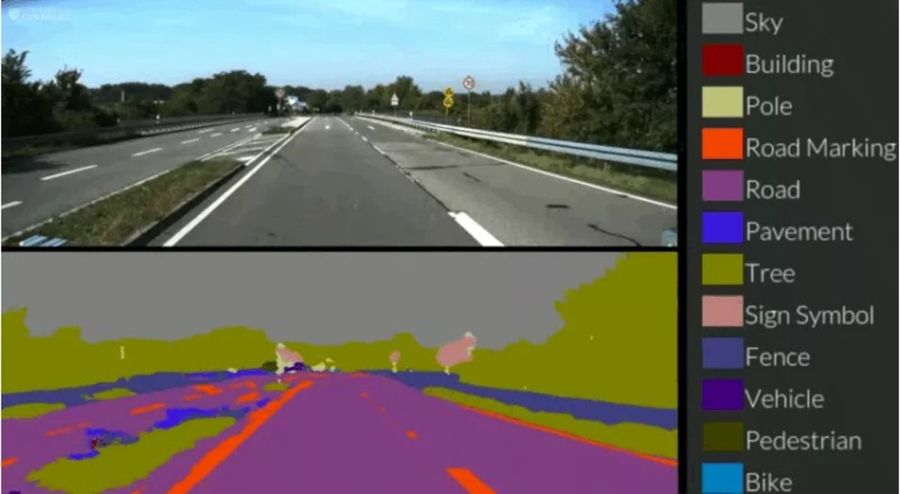
Вот что говорят разработчики о своём детище:
Приложение как бы учится на примерах, а «давали знания» ему студенты старшего курса Кембриджского Университета, задачей которых было вручную рассортировать по категориям каждый пиксель в 5000 фотографиях. В среднем, на одну фотографию уходило около получаса, а когда данный этап работы был завершён, предстояло ещё два дня тестов системы, прежде чем можно было спокойно её запускать.
Создатели также заявляют, что их приложение прекрасно функционирует и в ночное время, может различать свет, тень и определяет более 90% информации, получаемой с камеры, без ошибок.
Второе приложение определяет ваше местоположение, основываясь на геометрии зданий и всего, что можно увидеть на улице, получая данные из видеозаписи с телефона. Приложение тестировали в центре Кембриджа, и там оно показало прекрасные результаты, оказавшись точнее, чем GPS. Приложение, по сути, работает по тому же принципу, что и так называемые автономные автомобили – оно находит соответствие окружающей действительности с существующими картами, и таким образом ориентируется на дороге.
Но не стоит рассчитывать, что приложения помогут вам сделать свой автомобиль автономным. Но в ближайшем будущем, по заявлению Роберто Киполла, одного из исследователей проекта, разработчики надеются внедрить эту технологию в бытовую робототехнику – например, в роботизированный пылесос. Надо же с чего-то начинать!