Ce s-ar fi intamplat cu o masina mai putin "domestica" ? Care are variatii mari de avans (si alti parametri) de la o valoare "load" la alta. (de exemplu la granita intre insulele de eficienta a turbinei).
Sau cu o masina a carei parametri se regleaza explicit pentru treapta respectiva de viteza ? Exemplu de ECU ce au reglaje specifice pe treapte de viteze (Subaru 2002-2005 , Motec, Racing Code NBC01, si altele).
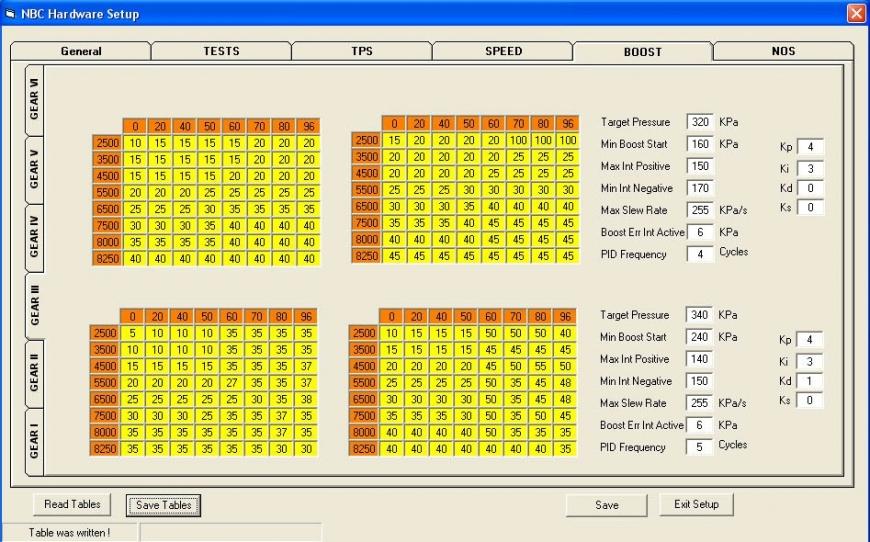
De exemplu, masina de curse din imagine are montat un calculator Racing Code NBC01 cu reglaje specifice pentru fiecare treapta de viteze.

Parametri specifici fiecarei trepte de viteza:
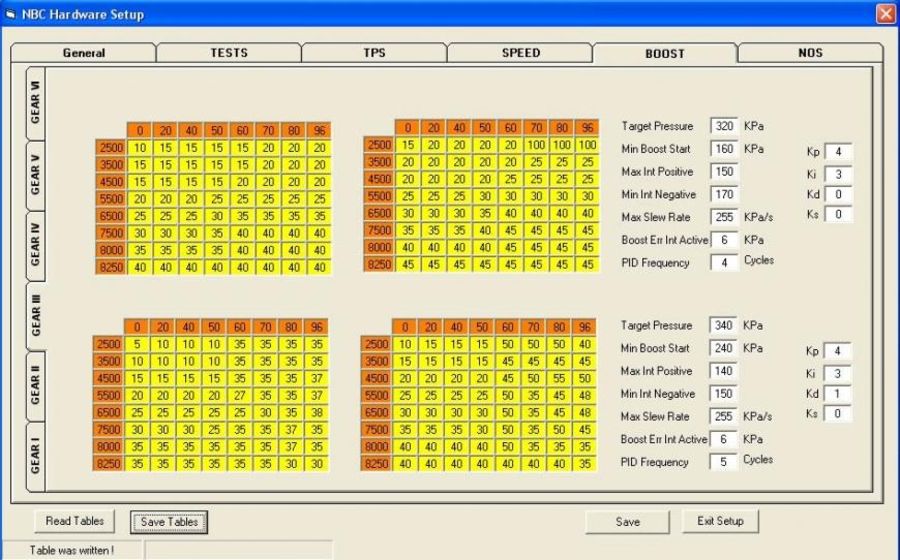
In partea stanga puteti observa tab-urile pentru treptele I, II, III,IV,V (si VI). Aceste reglaje nu se pot efectua pe un stand inertial fara sarcina si fara "road simulation".
Nu vreau sa spun despre nici un alt dyno ca este prost construit, dar unele dyno mai ieftine, au limite in comlexitatea testelor ce le pot efectua si se rezuma doar la a
"cadea" cateodata, binenteles doar in teste efectuate in trepte superioare, peste puterea declarata in talonul masinii, atingandu-si astfel scopul comercial.
5.1) Dyno-Tuning real. In timp ce graficele putere/cuplu de mai sus ale masini Mitsubishi Lancer 1.6 au valoare pur comerciala ("cazand peste puterea declarata de producator") ele nu spun nimic despre "inaintarea" masinii pe strada sau pe circuit. Aceasta "inaintare" este proportionala cu Forta de inaintare creata de cuplu la roata (puterea la roata).

Forta de inaintare= (Cuplu la roata )/(raza rotii)
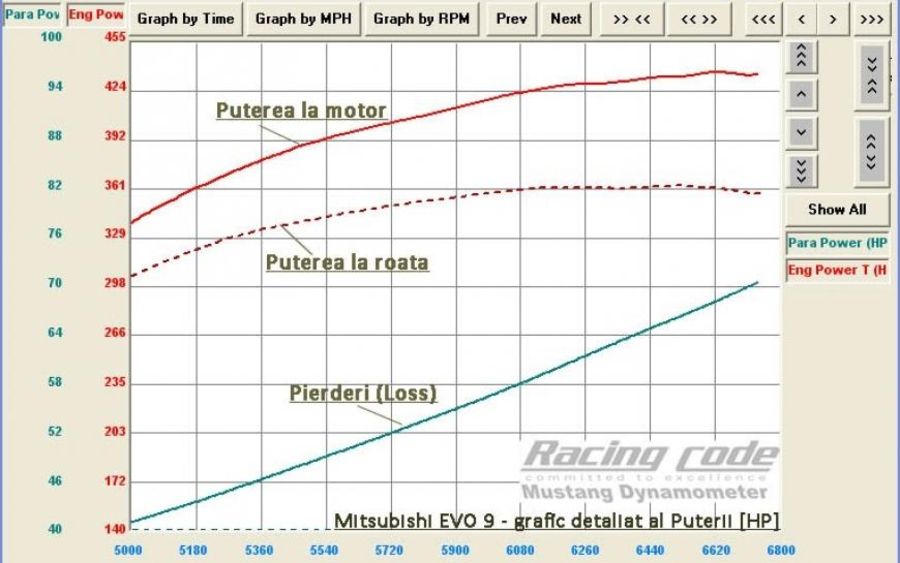
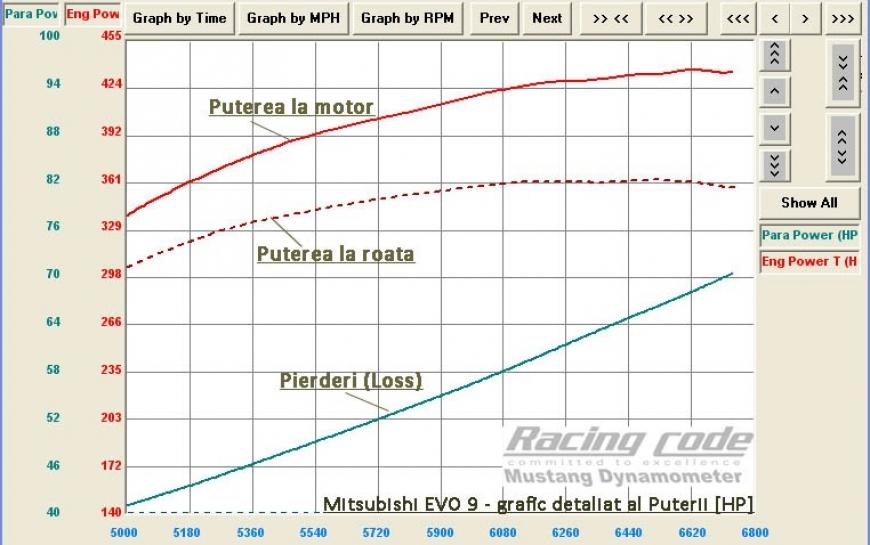
Graficul de mai sus reprezinta graficul "de lucru" al unui tuner competent ce are in vedere cresterea performantelor masinii respective. Este selectata fiecare zona de turatie pe rand si analizata PUTEREA LA ROATA ! acesta determinand forta de tractiune, respectiv inaintarea masinii. De exemplu in zona 6000 - 6800 RPM puterea la motor continua sa creasca, dar puterea la roata ramane constanta, chiar incepe sa scada dupa 6600 RPM.
Daca am fi folosit niste cauciucuri mai late pierderile ar fi fost mai mari si puterea la roata ar fi inceput sa scada rapid. Urmarind puterea la motor (ce include si
pierderile) nu putem avea o imagine clara a Fortei de Tractiune. Mai mult, puterea la roata in functie de turatie variaza cu treapta de viteza (pierderile cresc odata cu viteza) deci exista turatii optime RPM pentru schimbarea treptelor I-II, II-III, III-IV .. etc, ce nu pot fi determinate decat analizand PUTEREA LA ROATA in fiecare treapta de viteza pe un stand dyno de sasiu cu frana !
Acum putem contura functiile pe care un stand dyno performant trebuie sa le aiba:
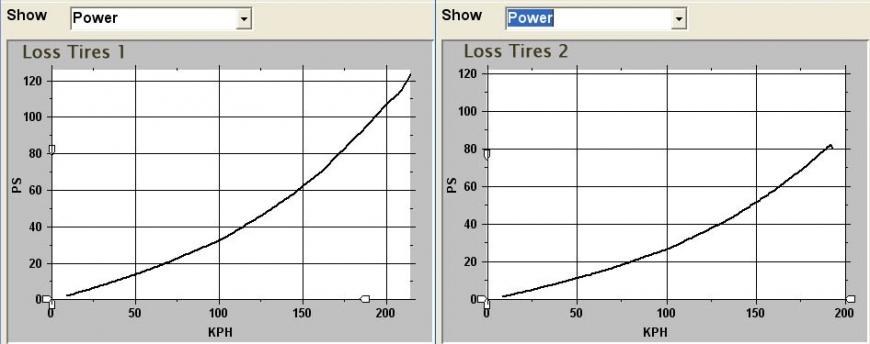
1) Sa poata testa masina "incaltata" cu cauciucurile cu care va rula - Deci sa fie un stand dyno cu role (chassis dyno). In timp ce standurile de motor sunt excelente pentru a testa exclusiv motorul, performantele acestuia se pot modifica cand se monteaza evacuarea, admisia etc .. iar standurile hub-dyno masurand puterea la planetare nu iau in considerare efectul cauciucurilor, a setarii geometriei masinii (unghiurile de cadere si de fuga) etc ....
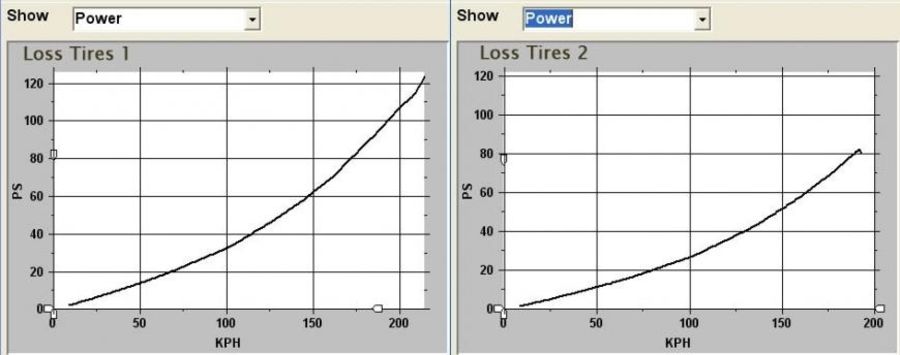
Diferite cauciucuri determina diferite pierderi, dupa cum se poate observa in graficul masurat de dyno Mustang de mai jos. Aceeasi masina dar diferite pierderi functie de cauciucuri.
2) Sa aiba frana reglabila, cu repetabilitate si drift termic redus, putandu-se testa masina in orice treapta de viteze.
3) Sa aiba capabilitatea de a simula diverse conditii de drum "road simulation" in functie de viteza si masa masinii (sarcina variabila cu viteza, inertia), sa poata simula panta de urcare ..etc
4) Sa poata testa masini cu tractiune integrala de ultima generatie (ex BMW, Audi) adica sa aiba angrenare mecanica intre rola fata si spate, sincronizand toate rolele mecanic, astfel incat transmisia masinii 4x4 sa nu fie afectata.
5) Sa poata calcula n = Eng.speed/Roll.speed dinamic. Calculand raportul de transmisie final in permanenta (nu numai la inceperea testului) poate afisa cuplul si puterea corect chiar daca se schimba vitezele in timpul testului. Exemplu I, II, III, IV ..etc vezi graficul de mai sus 4.2.1_5.
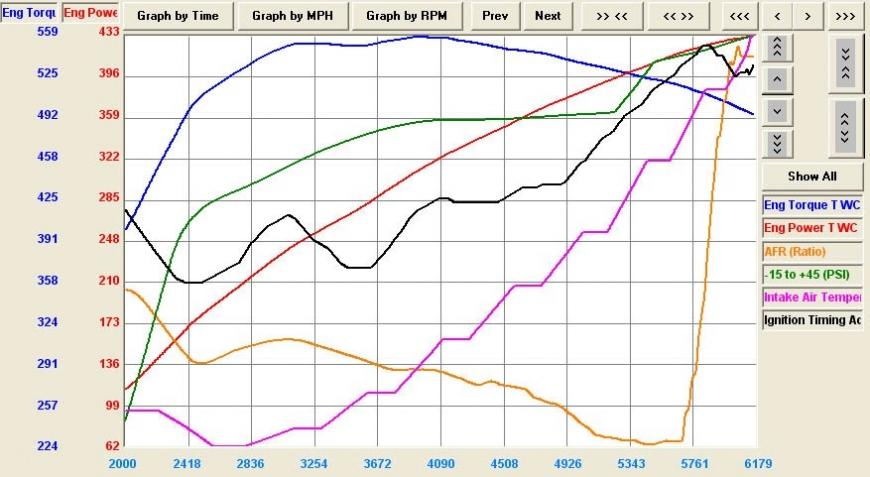
6) Sa poata achizitiona in timpul testului cat mai multi parametri de functionare ai motorului (avans, AFR, presiune, EGT,knock ...) si sa-i suprapuna peste graficul de putere pentru a abserva influenta acestora. De exemplu in graficul de mai jos putem observa ca acest Dodge Charger ramane fara benzina amestecul saracindu-se incepand cu 5700 RPM.

7) Sa poata fi calibrat prin metoda gravitationala!
In capitolul 3.1) am dedus formulele puterii plecand doar de la definitiile calului putere metric [PS] respectiv calul putere mecanic [HP] respectiv:

In formulele de mai sus forta este definita ca forta de greutate, indiferent ca masa este exprimata in Lb sau Kg. (vezi cap3.1)
In timp ce foarte multa lume ce nu cunoaste modul de functionare al unui dyno afirma: "fiecare dyno masoara in felul lui ..." sau "fiecare dyno masoara altceva ... ", toti producatorii (seriosi) de standuri dyno au inclus o metoda de verificare si calibrare a standului. Aceasta metoda respecta intocmai definitia puterii indiferent ca este exprimata in PS, HP sau KW:

Aceste formule demonstrate pas cu pas in Cap3.1) si folosite pe tot parcursul articolului reprezinta ecuatiile functionale ale ORICARUI dyno. (de motor, hub sau sasiu).
Daca intalniti un grafic dyno ce nu respecta aceste formule (adica la turatia RPM, avand Cuplul [Nm] indica alta putere decat rezulta din formulele de mai sus), acel dyno intr-adevar masoara eronat.
Deci daca un dyno masoara CUPLUL[Nm] la role si turatia RPM corect, acesta masoara corect !
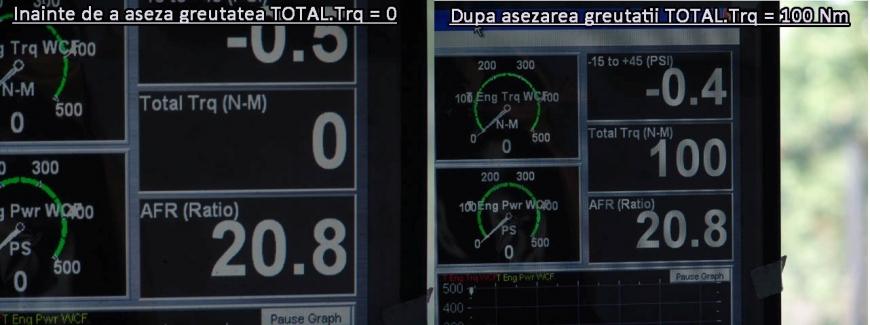
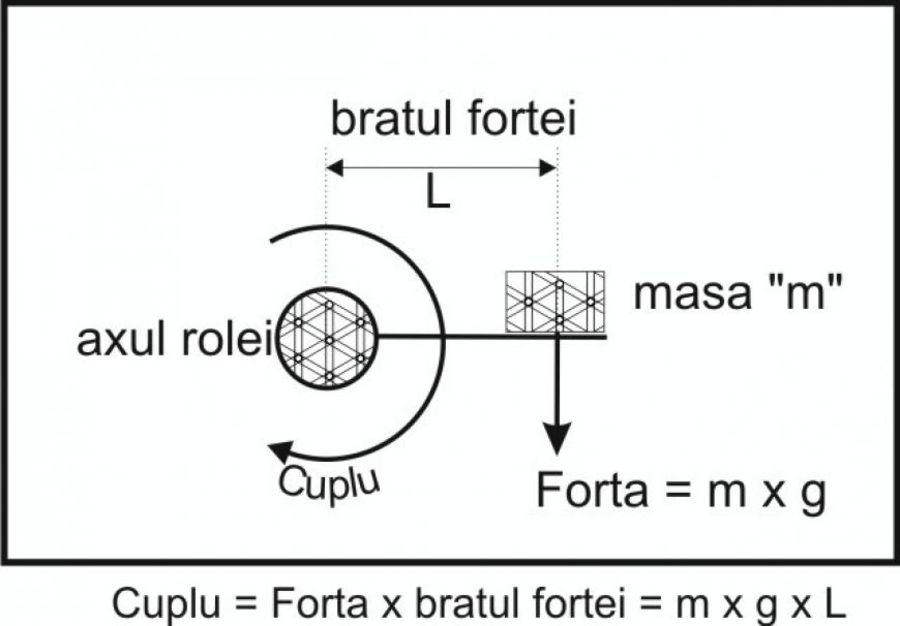
Pentru a testa daca un dyno masoara cuplul la rola, (TOTAL.Trq) corect, nu trebuie altceva decat sa aplicam un cuplu cunoscut la role si sa urmarim daca traductorul de cuplu al standului indica corect acel cuplu. Cel mai usor mod de a produce un cuplu este de a aseza o greutate pe un brat.
Procedura de testare sau calibrare gravitationala consta in:
Cu rolele standului libere, fara vre-o masina pe stand, asezam o masa (greutate) cunoscuta, pe o parghie (bratul fortei) aplicand astfel la role un cuplu (TOTAL.Trq) cunoscut; Dupa care, verificam daca standul indica corect acest cuplu aplicat .

Masa (greutatea), folosita pentru test a fost de 50 lb (deci o forta de 50 lbf ). Lungimea bratului fortei, masurata, fiind de 450 mm. Cu aceste date putem calcula cuplul pe care l-am produs la axul rolei standului (TOTAL.TRQ).

Daca standul dyno masoara corect ar trebui sa citeasca acest cuplu creat "artificial" la role. Dupa cum putem observa in fotografiile de mai jos; in lipsa greutatii, standul Mustang indica 0 [Nm] iar cu greutatea asezata indica 100 [Nm] adica exact cuplul aplicat la role calculat mai sus.

Observati ca in timp ce cuplu total masurat TOTAL.Trq este de 100 Nm, atat cuplul la motor Eng.Trq[Nm] cat si puterea la motor Eng.Pwr[PS] sunt afisate (in stanga ecranului) ca fiind egale cu 0. Acest lucru este in concordanta cu formulele 4.2), 4.3), 4.4). In cazul testului nostru TOTAL.Trq = 100[Nm] si RPM = 0.
Binenteles, standul Mustang Dynamometer masoara corect si are posibilitatea de a fi calibrat si verificat periodic prin aceasta metoda simpla dar foarte eficienta.
Aceasta metoda a fost aleasa de aproape toti producatorii de dyno seriosi (Maha, Rototest, Mustang si alti) datorita beneficiilor sale si anume:
- Posibilitatea de calibrare "on site" adica la sediul beneficiar
- Repetabilitate perfecta. (Elementele de calibrare: bratul, greutatea si acceleratia gravitationala a pamantului nu variaza in timp).
- Ofera o metoda de verificare a liniaritatii. Adica realizand testul cu diferite greutati se poate verifica TOATA plaja de masura a standului, nu numai o anumita valoare fixa.
- Ofera posibilitatea de verificare completa, simultana a sistemului de masurare a cuplului. Adica nu se testeaza separat traductorul de cuplu, separat interfata electronica, calculatorul si softul, ci tot lantul de masura odata. Producem un cuplu si il observam imediat pe ecran, spre deosebire de standurile dyno de sasiu inertiale ce nu au implementata nici o metoda de verificare / testare.
Pentru a intelege mai bine la ce ma refer reamintesc ca orice dyno de sasiu cu frana este in primul rand stand inertial (avand role poate face testul folosind doar rolele ca orice stand inertial) dar in plus are un sistem de absorptie (frana PAU).
Un stand dyno exclusiv inertial nu poate face verificarea/calibrarea gravitationala descrisa mai sus, deoarece nu are traductor de cuplu, el masurand doar cuplul de
acceleratie pe baza masurarii acceleratiei rolelor.
Este adevarat ca masa rolelor nu se modifica in timp, dar aceasta nu inseamna ca dyno-ul ca un intreg sistem de masura: mecanic, electronic, achizitie date si soft nu trebuie verificat si calibrat periodic.
Verificarea si calibrarea reprezinta operatii metrologice de care nu trebuie "scutit" nici un echipament de masura, oricare ar fi marimea fizica ce o masoara.
6.) Diferente intre Standul de motor si chassis dyno.
- Pe standul de motor nu exista ambreiaj, pierderi in rulmenti, cutie de viteza, diferentiale etc. (doar o parte din aceste pierderi pot fi masurate pe standul cu role)
- Pe standul de motor nu exista pierderi datorate frecarii intre cauciucuri si rolele standului
- Pe standul de motor pot fi deconectate toate sau doar o parte din accesorii
- Pe standul de motor temperatura aerului la admisie, apei de racire sau a uleiului poate fi controlata extern
- Pe standul de motor sistemul de admise/evacuare poate fi diferit de cele folosite pe masina.
7.) Cauza diferentelor ce pot aparea intre puterea la roata masurata de diferite Standuri cu role.
- Componenta cauciucurilor, presiunea si temperatura lor
- Temperatura motorului a transmisiei si a diferentialelor
- Metoda de fixare pe stand (pierderile cresc odata cu apasare pe role)
- Tipul de testare folosit: Doar cu inertia rolelor sau cu inertia rolelor si frana sau la RPM constant. In cazul standurilor cu frana controlul accelerarii se face prin
PAU.Trq.
- o rata mare a decelerarii va genera valori mari
- RPM constant va genera valori medii
- o rata mare a accelerarii va genera cele mai mici valori datorita pierderilor interne ale motorului si a transmisiei.
Pe un stand fara frana (stand inertial), nu exista posibilitatea de a programa accelerarea masinii, o masina mai puternica accelerand mai rapid pe acest tip de stand si putand introduce erori de masura.
- Conditiile atmosferice (temperatura, presiune, umiditate)
- Sistemul de achizitie al standului, optiunile de filtrare si clampare a datelor
In acest articol, plecand de la legile transmisiei mecanice si modul cum a fost definit calul putere, am demonstrat matematic toate ecuatiile ce definesc puterea, cuplul si masurarea acestora pe standul de motor, hub si sasiu.
Explicand in mod logic, coerent si exemplificand cu fise dyno sper ca am putut aduce mai multa lumina in acest domeniu de interes pentru pasionatii sportului cu motor si nu numai.
Echipa Tehnica Racing Code